难度: Hard
小王来到了游乐园,她玩的第一个项目是模拟推销员。有一个二维平面地图,其中散布着 N 个推销点,编号 0 到 N-1,不存在三点共线的情况。每两点之间有一条直线相连。游戏没有规定起点和终点,但限定了每次转角的方向。首先,小王需要先选择两个点分别作为起点和终点,然后从起点开始访问剩余 N-2 个点恰好一次并回到终点。访问的顺序需要满足一串给定的长度为 N-2 由 L 和 R 组成的字符串 direction,表示从起点出发之后在每个顶点上转角的方向。根据这个提示,小王希望你能够帮她找到一个可行的遍历顺序,输出顺序下标(若有多个方案,输出任意一种)。可以证明这样的遍历顺序一定是存在的。
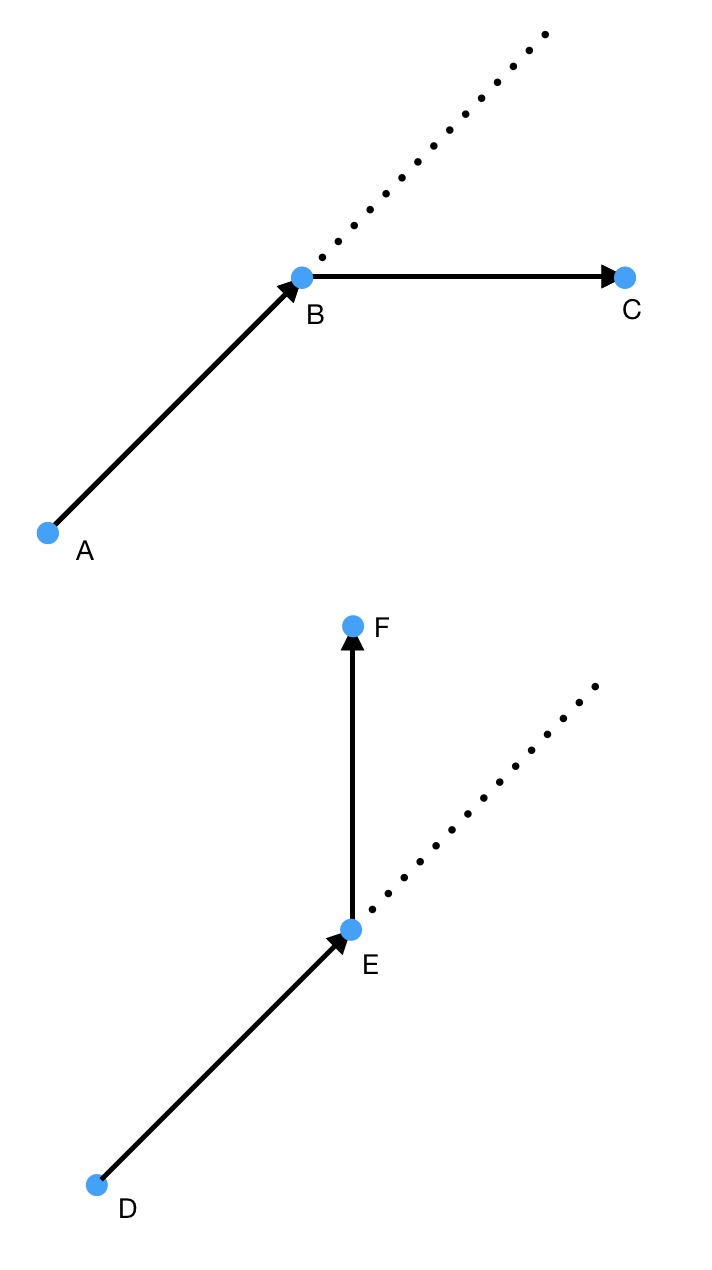
(上图:A->B->C 右转; 下图:D->E->F 左转)
示例 1:
输入:
points = [[1,1],[1,4],[3,2],[2,1]], direction = "LL"输入:
[0,2,1,3]解释:[0,2,1,3] 是符合"LL"的方案之一。在 [0,2,1,3] 方案中,0->2->1 是左转方向, 2->1->3 也是左转方向
示例 2:
输入:
points = [[1,3],[2,4],[3,3],[2,1]], direction = "LR"输入:
[0,3,1,2]解释:[0,3,1,2] 是符合"LR"的方案之一。在 [0,3,1,2] 方案中,0->3->1 是左转方向, 3->1->2 是右转方向
限制:
3 <= points.length <= 1000 且 points[i].length == 21 <= points[i][0],points[i][1] <= 10000direction.length == points.length - 2direction 只包含 "L","R"