难度: Hard
给你一个无向图(原始图),图中有 n 个节点,编号从 0 到 n - 1 。你决定将图中的每条边 细分 为一条节点链,每条边之间的新节点数各不相同。
图用由边组成的二维数组 edges 表示,其中 edges[i] = [ui, vi, cnti] 表示原始图中节点 ui 和 vi 之间存在一条边,cnti 是将边 细分 后的新节点总数。注意,cnti == 0 表示边不可细分。
要 细分 边 [ui, vi] ,需要将其替换为 (cnti + 1) 条新边,和 cnti 个新节点。新节点为 x1, x2, ..., xcnti ,新边为 [ui, x1], [x1, x2], [x2, x3], ..., [xcnti-1, xcnti], [xcnti, vi] 。
现在得到一个 新的细分图 ,请你计算从节点 0 出发,可以到达多少个节点?如果节点间距离是 maxMoves 或更少,则视为 可以到达 。
给你原始图和 maxMoves ,返回 新的细分图中从节点 0 出发 可到达的节点数 。
示例 1:
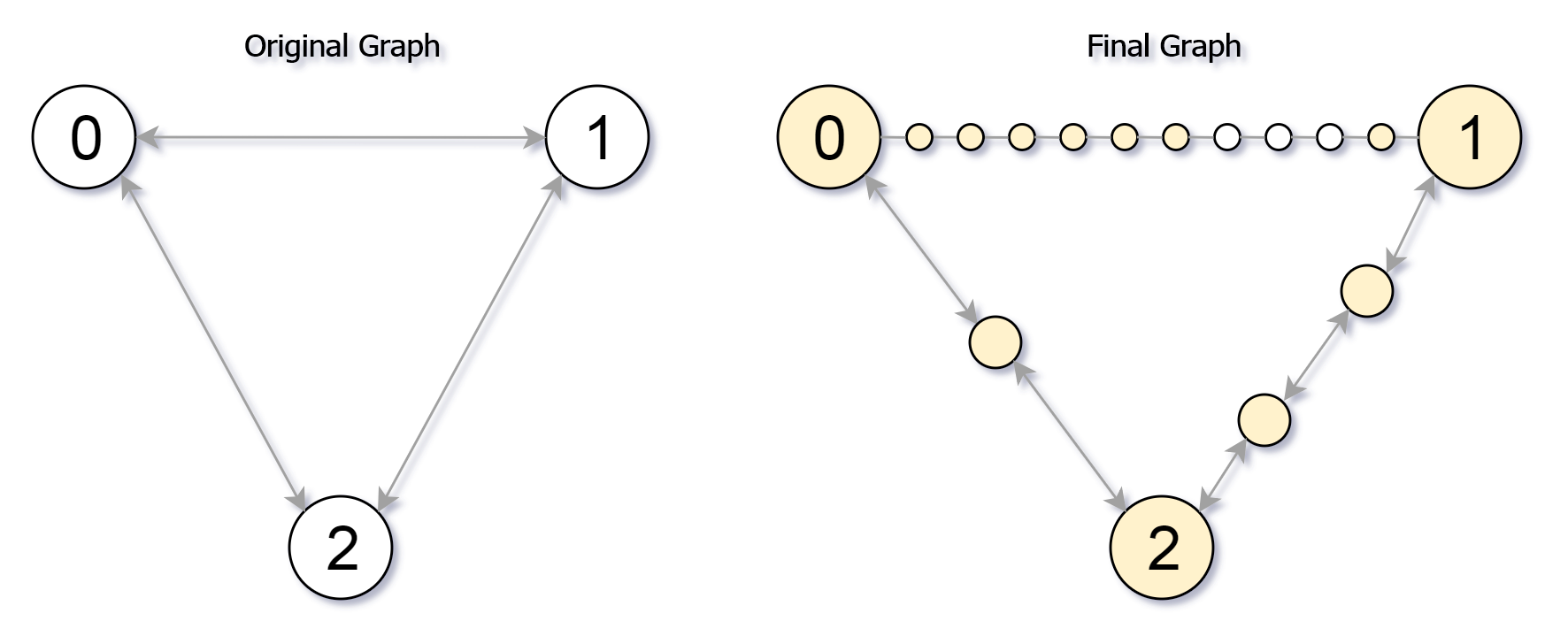
输入:edges = [[0,1,10],[0,2,1],[1,2,2]], maxMoves = 6, n = 3 输出:13 解释:边的细分情况如上图所示。 可以到达的节点已经用黄色标注出来。
示例 2:
输入:edges = [[0,1,4],[1,2,6],[0,2,8],[1,3,1]], maxMoves = 10, n = 4 输出:23
示例 3:
输入:edges = [[1,2,4],[1,4,5],[1,3,1],[2,3,4],[3,4,5]], maxMoves = 17, n = 5 输出:1 解释:节点 0 与图的其余部分没有连通,所以只有节点 0 可以到达。
提示:
0 <= edges.length <= min(n * (n - 1) / 2, 104)edges[i].length == 30 <= ui < vi < n- 图中 不存在平行边
0 <= cnti <= 1040 <= maxMoves <= 1091 <= n <= 3000