难度: Medium
现有一个加权无向连通图。给你一个正整数 n ,表示图中有 n 个节点,并按从 1 到 n 给节点编号;另给你一个数组 edges ,其中每个 edges[i] = [ui, vi, weighti] 表示存在一条位于节点 ui 和 vi 之间的边,这条边的权重为 weighti 。
从节点 start 出发到节点 end 的路径是一个形如 [z0, z1, z2, ..., zk] 的节点序列,满足 z0 = start 、zk = end 且在所有符合 0 <= i <= k-1 的节点 zi 和 zi+1 之间存在一条边。
路径的距离定义为这条路径上所有边的权重总和。用 distanceToLastNode(x) 表示节点 n 和 x 之间路径的最短距离。受限路径 为满足 distanceToLastNode(zi) > distanceToLastNode(zi+1) 的一条路径,其中 0 <= i <= k-1 。
返回从节点 1 出发到节点 n 的 受限路径数 。由于数字可能很大,请返回对 109 + 7 取余 的结果。
示例 1:
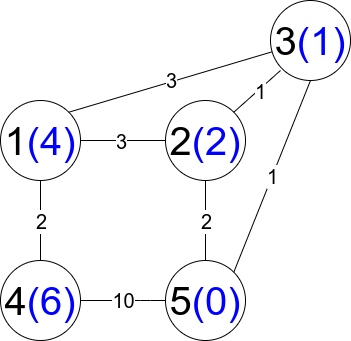
输入:n = 5, edges = [[1,2,3],[1,3,3],[2,3,1],[1,4,2],[5,2,2],[3,5,1],[5,4,10]] 输出:3 解释:每个圆包含黑色的节点编号和蓝色的 distanceToLastNode 值。三条受限路径分别是: 1) 1 --> 2 --> 5 2) 1 --> 2 --> 3 --> 5 3) 1 --> 3 --> 5
示例 2:
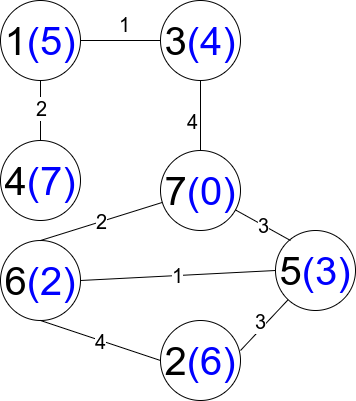
输入:n = 7, edges = [[1,3,1],[4,1,2],[7,3,4],[2,5,3],[5,6,1],[6,7,2],[7,5,3],[2,6,4]] 输出:1 解释:每个圆包含黑色的节点编号和蓝色的 distanceToLastNode 值。唯一一条受限路径是:1 --> 3 --> 7 。
提示:
1 <= n <= 2 * 104n - 1 <= edges.length <= 4 * 104edges[i].length == 31 <= ui, vi <= nui != vi1 <= weighti <= 105- 任意两个节点之间至多存在一条边
- 任意两个节点之间至少存在一条路径