难度: Medium
给你一个 n 个点的无向图,节点从 0 到 n - 1 编号。给你一个长度为 n 下标从 0 开始的整数数组 vals ,其中 vals[i] 表示第 i 个节点的值。
同时给你一个二维整数数组 edges ,其中 edges[i] = [ai, bi] 表示节点 ai 和 bi 之间有一条双向边。
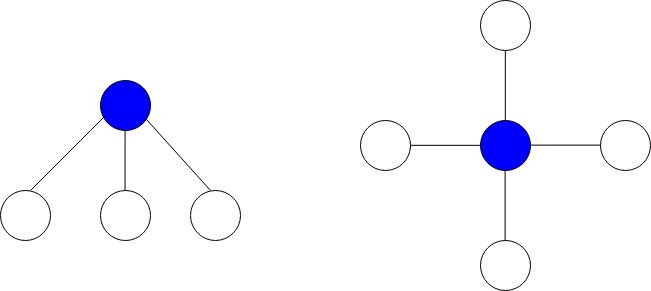
星图 是给定图中的一个子图,它包含一个中心节点和 0 个或更多个邻居。换言之,星图是给定图中一个边的子集,且这些边都有一个公共节点。
下图分别展示了有 3 个和 4 个邻居的星图,蓝色节点为中心节点。
星和 定义为星图中所有节点值的和。
给你一个整数 k ,请你返回 至多 包含 k 条边的星图中的 最大星和 。
示例 1:
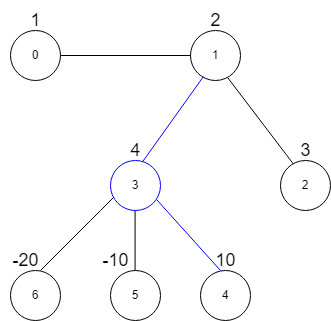
输入:vals = [1,2,3,4,10,-10,-20], edges = [[0,1],[1,2],[1,3],[3,4],[3,5],[3,6]], k = 2 输出:16 解释:上图展示了输入示例。 最大星和对应的星图在上图中用蓝色标出。中心节点是 3 ,星图中还包含邻居 1 和 4 。 无法得到一个和大于 16 且边数不超过 2 的星图。
示例 2:
输入:vals = [-5], edges = [], k = 0 输出:-5 解释:只有一个星图,就是节点 0 自己。 所以我们返回 -5 。
提示:
n == vals.length1 <= n <= 105-104 <= vals[i] <= 1040 <= edges.length <= min(n * (n - 1) / 2, 105)edges[i].length == 20 <= ai, bi <= n - 1ai != bi0 <= k <= n - 1