难度: Hard
给你一张 无向 图,图中有 n 个节点,节点编号从 0 到 n - 1 (都包括)。同时给你一个下标从 0 开始的整数数组 values ,其中 values[i] 是第 i 个节点的 价值 。同时给你一个下标从 0 开始的二维整数数组 edges ,其中 edges[j] = [uj, vj, timej] 表示节点 uj 和 vj 之间有一条需要 timej 秒才能通过的无向边。最后,给你一个整数 maxTime 。
合法路径 指的是图中任意一条从节点 0 开始,最终回到节点 0 ,且花费的总时间 不超过 maxTime 秒的一条路径。你可以访问一个节点任意次。一条合法路径的 价值 定义为路径中 不同节点 的价值 之和 (每个节点的价值 至多 算入价值总和中一次)。
请你返回一条合法路径的 最大 价值。
注意:每个节点 至多 有 四条 边与之相连。
示例 1:
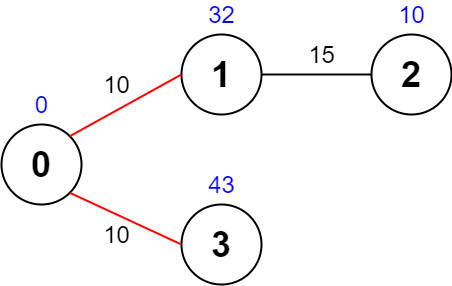
输入:values = [0,32,10,43], edges = [[0,1,10],[1,2,15],[0,3,10]], maxTime = 49 输出:75 解释: 一条可能的路径为:0 -> 1 -> 0 -> 3 -> 0 。总花费时间为 10 + 10 + 10 + 10 = 40 <= 49 。 访问过的节点为 0 ,1 和 3 ,最大路径价值为 0 + 32 + 43 = 75 。
示例 2:
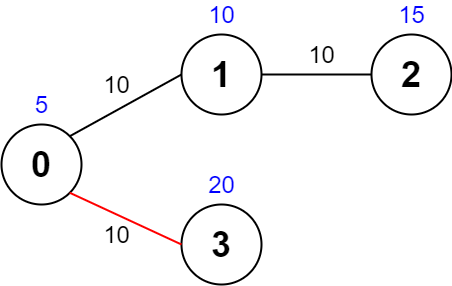
输入:values = [5,10,15,20], edges = [[0,1,10],[1,2,10],[0,3,10]], maxTime = 30 输出:25 解释: 一条可能的路径为:0 -> 3 -> 0 。总花费时间为 10 + 10 = 20 <= 30 。 访问过的节点为 0 和 3 ,最大路径价值为 5 + 20 = 25 。
示例 3:
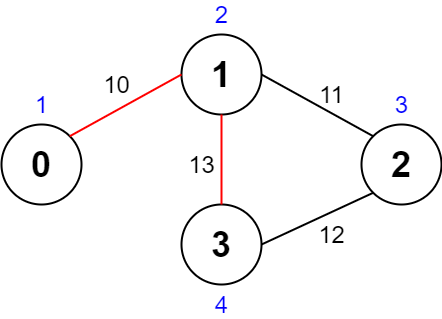
输入:values = [1,2,3,4], edges = [[0,1,10],[1,2,11],[2,3,12],[1,3,13]], maxTime = 50 输出:7 解释: 一条可能的路径为:0 -> 1 -> 3 -> 1 -> 0 。总花费时间为 10 + 13 + 13 + 10 = 46 <= 50 。 访问过的节点为 0 ,1 和 3 ,最大路径价值为 1 + 2 + 4 = 7 。
示例 4:
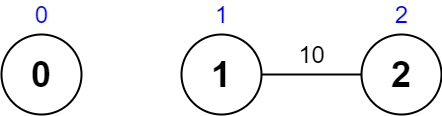
输入:values = [0,1,2], edges = [[1,2,10]], maxTime = 10 输出:0 解释: 唯一一条路径为 0 。总花费时间为 0 。 唯一访问过的节点为 0 ,最大路径价值为 0 。
提示:
n == values.length1 <= n <= 10000 <= values[i] <= 1080 <= edges.length <= 2000edges[j].length == 30 <= uj < vj <= n - 110 <= timej, maxTime <= 100[uj, vj]所有节点对 互不相同 。- 每个节点 至多有四条 边。
- 图可能不连通。