难度: Hard
小扣参加的秋日市集景区共有 $N$ 个景点,景点编号为 $1$~$N$。景点内设有 $N-1$ 条双向道路,使所有景点形成了一个二叉树结构,根结点记为 `root`,景点编号即为节点值。
由于秋日市集景区的结构特殊,游客很容易迷路,主办方决定在景区的若干个景点设置导航装置,按照所在景点编号升序排列后定义装置编号为 1 ~ M。导航装置向游客发送数据,数据内容为列表 `[游客与装置 1 的相对距离,游客与装置 2 的相对距离,...,游客与装置 M 的相对距离]`。由于游客根据导航装置发送的信息来确认位置,因此主办方需保证游客在每个景点接收的数据信息皆不相同。请返回主办方最少需要设置多少个导航装置。
**示例 1:**
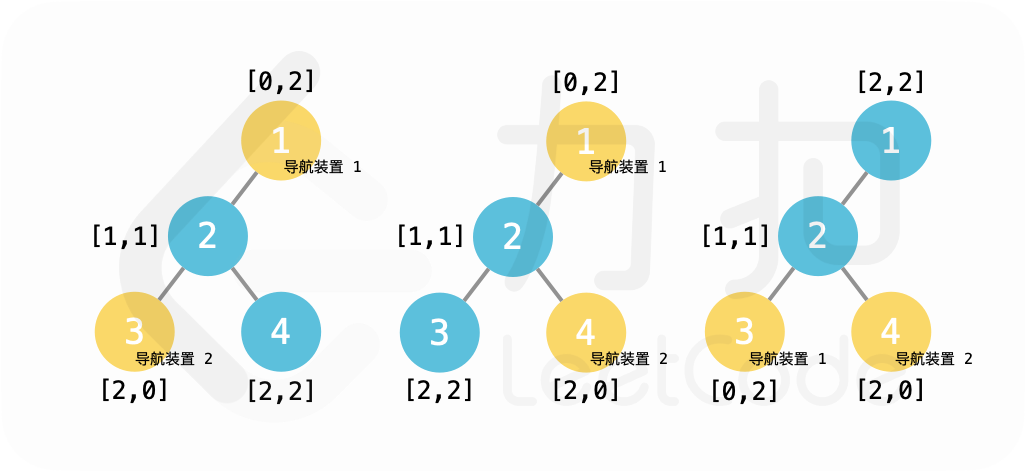
>输入:`root = [1,2,null,3,4]`
>
>输出:`2`
>
>解释:在景点 1、3 或景点 1、4 或景点 3、4 设置导航装置。
>
>{:height="250px"}
**示例 2:**
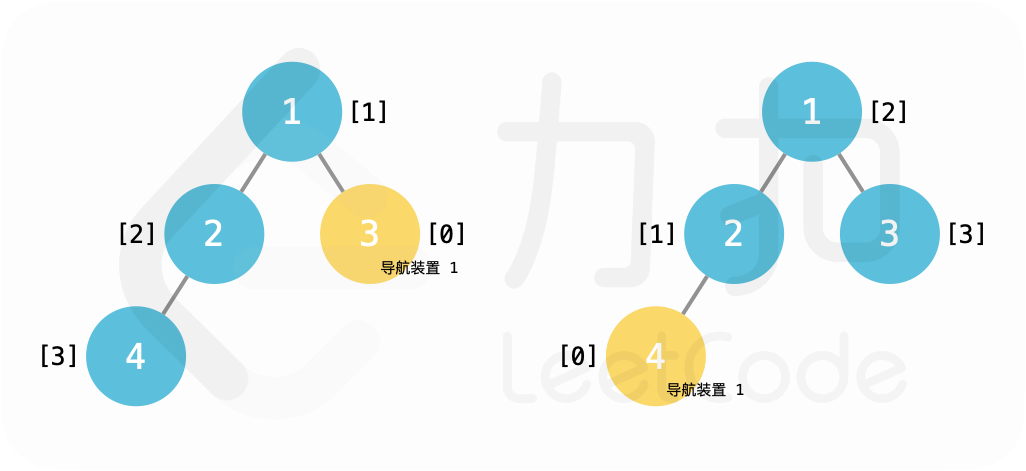
>输入:`root = [1,2,3,4]`
>
>输出:`1`
>
>解释:在景点 3、4 设置导航装置皆可。
>
>{:height="200px"}
**提示:**
- `2 <= N <= 50000`
- 二叉树的非空节点值为 `1~N` 的一个排列。